
初识SLAM
相机
单目相机
优点:结构简单,成本低
缺点:无法计算 深度 + 尺度
无法计算物体与相机间的距离,单目SLAM估计的轨迹和地图与真实值相差一个因子
双目相机
- 优点:克服深度问题(距离)
- 缺点:计算量大
深度相机(RGB-D相机)
- 优点:节省计算资源(通过红外结构光/Time-of-Flight(ToF))
- 缺点:测量范围窄,噪声大,视野小,易受日光干扰,无法测量透射材质
视觉SLAM的目标
通过一些图像,进行定位和地图构建
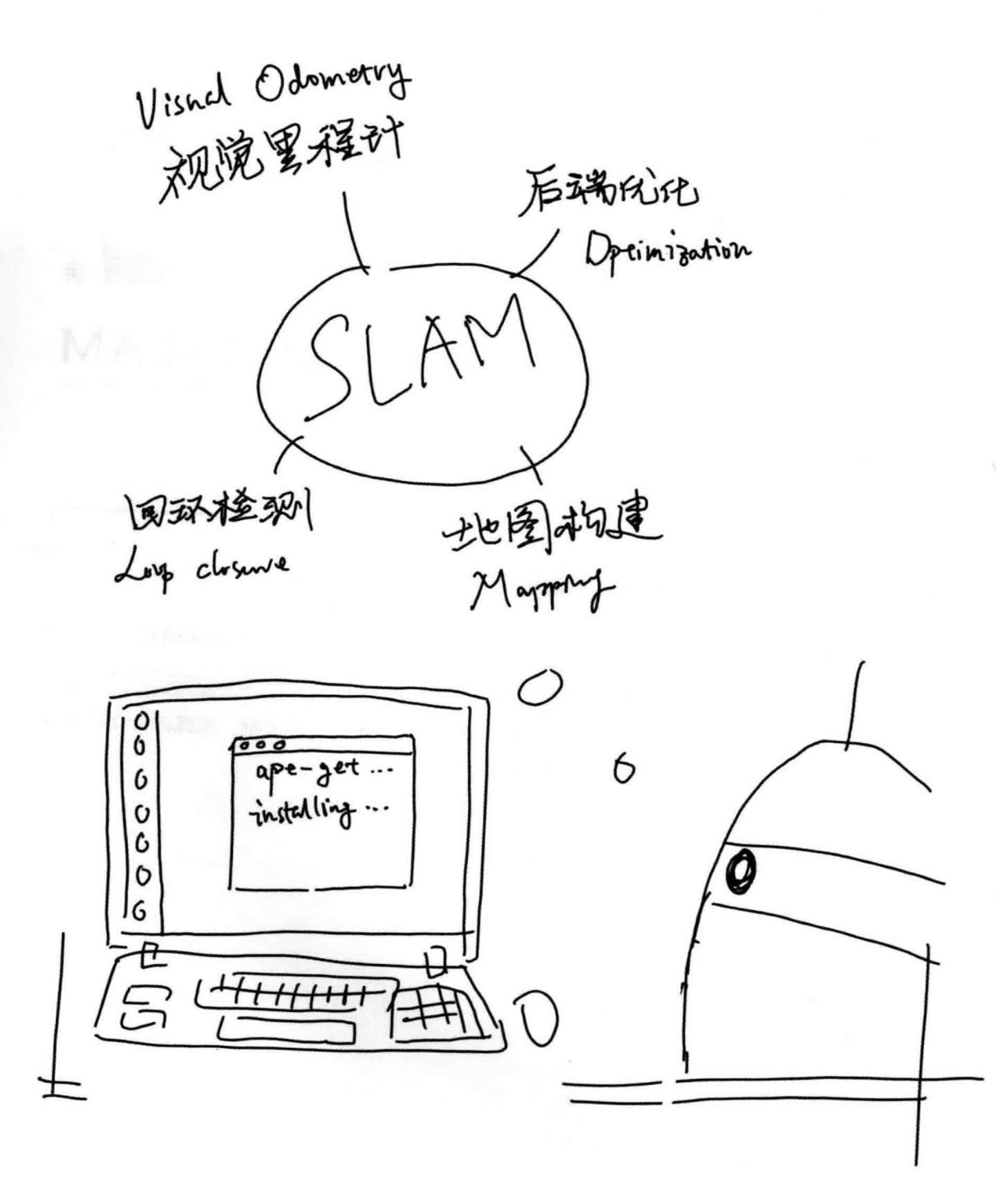
经典视觉SLAM框架
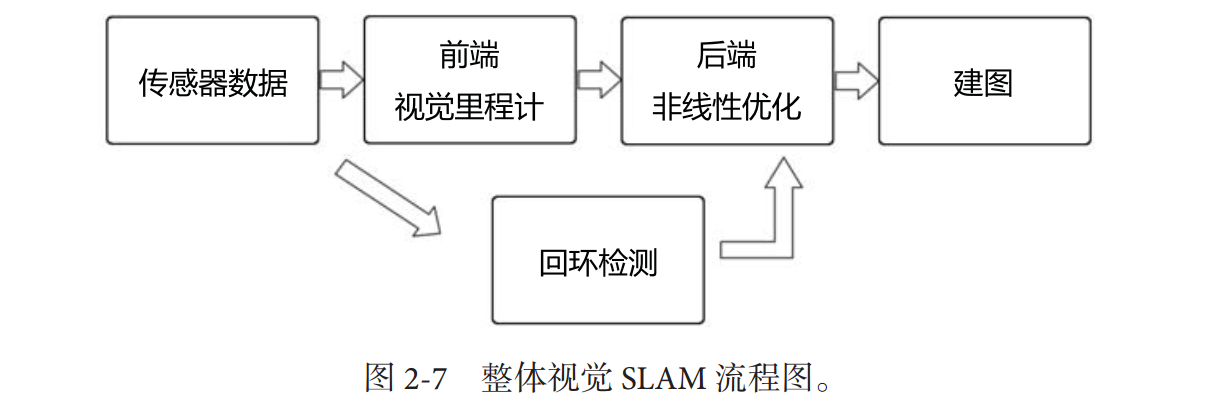
视觉里程计(前端)
- 目的:通过相邻帧间的图像,估计相机运动,回复场景的空间结构
- 问题:出现累计漂移(每次估计有误差)
- 解决:后端优化,回环检测
后端优化
目的:处理SLAM过程中的噪声问题
①如何从带有噪声的数据中估计整个系统的状态
②这个状态估计的不确定性有多大(最大后验概率估计)
本质:对运动主体自身和周围环境空间不确定性的估计
回环检测
- 目的:解决位置估计随时间漂移的问题
- 方法:让机器人具有识别到过的场景的能力(判断图像相似性),然后修正
建图
度量地图
- 特点:精确地表示地图中物体地的位置关系
- 缺点:耗费大量存储空间,许多细节无用,一致性问题
拓扑地图
- 特点:强调地图元素之间的关系
- 缺点:不擅长表达具有复杂结构的地图
SLAM问题的数学描述
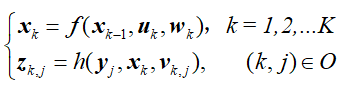
状态估计问题(转化)
噪声
- 线性/非线性系统
- 高斯/非高斯系统
主流优化技术(优化技术明显优于滤波技术)
- 图优化
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 zerd1y-Blog!




