
线性回归的从零开始实现(深度学习)
虽然现代的深度学习框架几乎可以自动化地进行所有这些工作,但从零开始实现可以确保我们真正知道自己在做什么。 同时,了解更细致的工作原理将方便我们自定义模型、自定义层或自定义损失函数
生成数据集
为了简单起见,我们将根据带有噪声的线性模型构造一个人造数据集。
任务
使用这个有限样本的数据集来恢复这个模型的参数
生成一个包含1000个样本的数据集,每个样本包含从标准正态分布中采样的2个特征。
使用线性模型参数$\mathbf{w} = [2, -3.4]^\top$、$b = 4.2$和噪声项$\epsilon$生成数据集及其标签:
$$
\mathbf{y}= \mathbf{X} \mathbf{w} + b + \mathbf\epsilon
$$
$\epsilon$可以视为模型预测和标签时的潜在观测误差。在这里我们认为标准假设成立,即$\epsilon$服从均值为0的正态分布。为了简化问题,我们将标准差设为0.01。
1 | %matplotlib inline |
random:用于生成随机数X:形状为(num_examples, len(w))的特征矩阵,每一行是一个样本。y:形状为(num_examples, 1)的标签列向量,符合y = Xw + b + 噪声。torch.matmul进行矩阵乘法(包括点积、矩阵-向量乘法和矩阵-矩阵乘法)y += torch.normal(0, 0.01, y.shape):添加均值为 0,标准差为 0.01 的噪声reshape(-1, 1):-1表示自动推导true_w = [2, -3.4]:设定真实权重true_b = 4.2:设定真实偏置项eatures, labels = synthetic_data(true_w, true_b, 1000):- 生成 1000 个样本,每个样本有 2 个特征。
features形状是(1000, 2),labels形状是(1000, 1)。
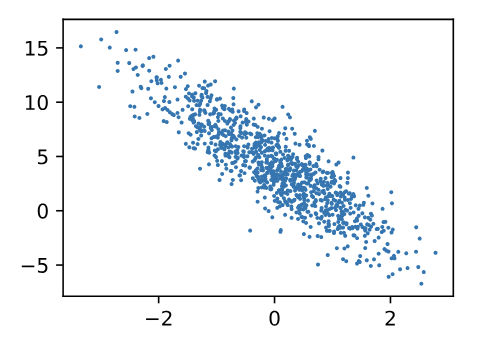
d2l.set_figsize():设置 Matplotlib 图像大小d2l.plt.scatter(features[:, 1].detach().numpy(), labels.detach().numpy(), 1);:features[:, 1]:取所有样本的第二个特征(x2)。labels:对应的标签值。.detach().numpy():将 PyTorch 张量转换为 NumPy 数组,方便 Matplotlib 处理。plt.scatter(..., ..., 1):绘制散点图,点大小设为1。
plt.scatter(x, y, s=None, c=None, marker=None, alpha=None, ...):x:散点图的 横坐标数据(可以是列表或 NumPy/PyTorch 张量)。y:散点图的 纵坐标数据(可以是列表或 NumPy/PyTorch 张量)。s:散点的大小(1表示散点非常小)。c:散点的颜色(可以是单个颜色或一个颜色数组)。marker:散点的形状(如'o'、's'、'x')。alpha:透明度(取值0~1,1表示不透明,0.5表示半透明)。
读取数据集
训练模型时要对数据集进行遍历,每次抽取一小批量样本,并使用它们来更新我们的模型
由于这个过程是训练机器学习算法的基础,所以有必要定义一个函数, 该函数能打乱数据集中的样本并以小批量方式获取数据。
定义一个data_iter函数, 该函数接收批量大小、特征矩阵和标签向量作为输入,生成大小为batch_size的小批量。 每个小批量包含一组特征和标签。
1 | def data_iter(batch_size, features, labels): |
num_examples = len(features):获取数据集中样本的总数(1000 个)。indices = list(range(num_examples)):创建一个从0到num_examples-1的索引列表。andom.shuffle(indices):随机打乱索引,确保每次抽取的数据是无序的(随机性)。(不会返回新的列表,而是就地修改原列表)
for i in range(0, num_examples, batch_size):range(0, num_examples, batch_size):从0开始,每次跳batch_size个样本。- 这样可以保证每次选取
batch_size个数据点,直到遍历完整个数据集。
batch_indices = torch.tensor(indices[i: min(i + batch_size, num_examples)]):indices[i: min(i + batch_size, num_examples)]:- 取出当前批次的
batch_size个索引。 min(i + batch_size, num_examples)确保不会超出数据集范围。
- 取出当前批次的
torch.tensor(...):将索引列表转换为 PyTorch 张量。
yield features[batch_indices], labels[batch_indices]:features[batch_indices]:按照随机索引,取出对应的特征值。labels[batch_indices]:按照随机索引,取出对应的标签值。yield让函数成为 生成器,每次调用它时都会返回一个新的 batch 数据。
关键字 作用 运行后函数是否终止 适用于 return直接返回值 终止函数 普通函数 yield返回一个值,下次继续执行 不会终止,记住当前状态 生成器 data_iter(batch_size, features, labels)生成一个 批量数据的迭代器。for X, y in ...获取每个小批量数据:X是当前 batch 的 特征张量,形状(10, 2)(10 个样本,每个样本 2 个特征)。y是当前 batch 的 标签张量,形状(10, 1)(10 个样本,每个样本 1 个标签)。
break只打印 第一个 batch,否则会继续遍历整个数据集。
初始化模型参数
在我们开始用小批量随机梯度下降优化我们的模型参数之前, 我们需要先有一些参数
1 | w = torch.normal(0, 0.01, size=(2,1), requires_grad=True) |
在初始化参数之后,我们的任务是更新这些参数,直到这些参数足够拟合我们的数据。
torch.normal(0, 0.01, size=(2,1))生成一个2×1 的张量(即 2 行 1 列的矩阵)。
数据服从均值 0,标准差 0.01 的正态分布(高斯分布)。
这样做的目的是初始化
w接近 0 的随机值,而不是全 0,防止梯度更新时陷入零梯度问题。
requires_grad=True:让 PyTorch 记录w的梯度,用于后续反向传播计算∇w。torch.zeros(1, requires_grad=True):torch.zeros(1):这部分代码创建了一个大小为(1,)的张量,其中唯一的元素是0。这个张量表示模型的偏置b,在初始化时设置为0。1表示张量的大小为 1(即只有一个元素)。
定义模型
接下来,我们必须定义模型,将模型的输入和参数同模型的输出关联起来。
要计算线性模型的输出,我们只需计算输入特征$\mathbf{X}$和模型权重$\mathbf{w}$的矩阵-向量乘法后加上偏置$b$。注意,上面的$\mathbf{Xw}$是一个向量,而$b$是一个标量。(广播机制)
1 | def linreg(X, w, b): #@save |
定义损失函数
这里我们使用平方损失函数。 在实现中,我们需要将真实值y的形状转换为和预测值y_hat的形状相同。
1 | def squared_loss(y_hat, y): #@save |
y.reshape(y_hat.shape):目的是将y的形状转换为和y_hat相同的形状。这是因为y和y_hat在训练时可能不是完全相同的形状,比如一个是列向量,一个是行向量。通过reshape,我们确保两者的形状一致,便于进行差值计算。
定义优化算法
该函数接受模型参数集合、学习速率和批量大小作为输入。每 一步更新的大小由学习速率lr决定。
因为我们计算的损失是一个批量样本的总和,所以我们用批量大小(batch_size) 来规范化步长,这样步长大小就不会取决于我们对批量大小的选择。
1 | def sgd(params, lr, batch_size): #@save |
sgd(params, lr, batch_size):这是实现小批量随机梯度下降的函数。params:包含所有模型参数(如权重和偏置)的列表。lr:学习率(Learning Rate),它控制每次参数更新的步长。batch_size:小批量的大小,表示一次训练中使用的样本数量。
with torch.no_grad():在更新参数时,禁用梯度计算。- 在 PyTorch 中,默认情况下,操作会记录梯度用于反向传播(反向传播会计算梯度)。而在更新参数时,我们不需要计算梯度,所以使用
torch.no_grad()来确保更新过程不会干扰梯度计算,节省内存并加速计算。
- 在 PyTorch 中,默认情况下,操作会记录梯度用于反向传播(反向传播会计算梯度)。而在更新参数时,我们不需要计算梯度,所以使用
for param in params:对所有模型参数进行迭代(例如,权重和偏置)。param -= lr * param.grad / batch_size:这是参数更新的公式param.grad:该参数的梯度,即损失函数相对于该参数的导数。这个值告诉我们该如何调整参数以减小损失。lr:学习率,它决定了更新的步长。较高的学习率会导致参数大幅度调整,较低的学习率会使调整幅度较小。/ batch_size:因为我们采用的是小批量梯度下降,所以在计算梯度时是基于一个批次的样本,而不是整个数据集。为了使得每个样本对梯度的影响一致,需要除以batch_size(批次大小),得到平均梯度。param -= ...:更新规则:减去梯度的方向,因为我们要减少损失,梯度下降的方向是朝着损失减小的方向调整参数。
param.grad.zero_():每次参数更新之后,将参数的梯度清零。- 在 PyTorch 中,梯度是累加的。每次执行反向传播时,梯度会加到现有的梯度上。为了避免梯度累加影响下一次更新,我们需要在每次更新参数后清除梯度。
zero_()是一个原地操作,用于将param.grad清零。
- 在 PyTorch 中,梯度是累加的。每次执行反向传播时,梯度会加到现有的梯度上。为了避免梯度累加影响下一次更新,我们需要在每次更新参数后清除梯度。
训练
在每次迭代中,我们读取一小批量训练样本,并通过我们的模型来获得一组预测。 计算完损失后,我们开始反向传播,存储每个参数的梯度。 最后,我们调用优化算法sgd来更新模型参数。
概括一下,我们将执行以下循环:
- 初始化参数
- 重复以下训练,直到完成
- 计算梯度$\mathbf{g} \leftarrow \partial_{(\mathbf{w},b)} \frac{1}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} l(\mathbf{x}^{(i)}, y^{(i)}, \mathbf{w}, b)$
- 更新参数$(\mathbf{w}, b) \leftarrow (\mathbf{w}, b) - \eta \mathbf{g}$
在每个迭代周期(epoch)中,我们使用data_iter函数遍历整个数据集, 并将训练数据集中所有样本都使用一次(假设样本数能够被批量大小整除)。 这里的迭代周期个数num_epochs和学习率lr都是超参数,分别设为3和0.03。
1 | lr = 0.03 |
初始化参数
lr是学习率,控制每次参数更新的步长。num_epochs是训练的轮数,表示数据集会被遍历多少次。net是线性回归模型,假设是通过linreg函数定义的。这个模型会使用w和b作为参数。loss是损失函数,选择的是均方误差(squared loss)。
训练过程
for epoch in range(num_epochs):循环遍历每一轮(epoch)。在每一轮中,所有训练数据都会被分批次处理。for X, y in data_iter(batch_size, features, labels):这个循环遍历数据集的每个小批量(mini-batch)。X和y分别是该批次的特征和标签。l = loss(net(X, w, b), y):对于当前小批量数据,通过线性回归模型net(X, w, b)预测输出,并计算损失函数的值l。其中,net(X, w, b)计算的是预测结果,y是真实标签。l.sum().backward():计算损失函数关于w和b的梯度。l.sum()是把所有批次样本的损失加和,以确保每次反向传播的梯度是整个批次的平均值。sgd([w, b], lr, batch_size):使用小批量随机梯度下降(SGD)方法来更新参数w和b。这个函数会根据学习率lr和批次大小batch_size来调整w和b的值。
评估损失
with torch.no_grad():在评估损失时,不需要计算梯度,因为我们只关心损失的值,而不需要更新参数。train_l = loss(net(features, w, b), labels):计算整个数据集的损失(训练集的损失),以评估当前模型的性能。print(f'epoch {epoch + 1}, loss {float(train_l.mean()):f}'):输出当前轮次的平均损失。
训练结果
true_w和true_b是线性回归模型的真实参数(生成数据时使用的参数)。w.reshape(true_w.shape):确保w的形状与true_w一致。true_w - w.reshape(true_w.shape)和true_b - b:计算模型估计的参数与真实参数之间的误差,并输出。
脚本
1 | %matplotlib inline |










